

產品中心
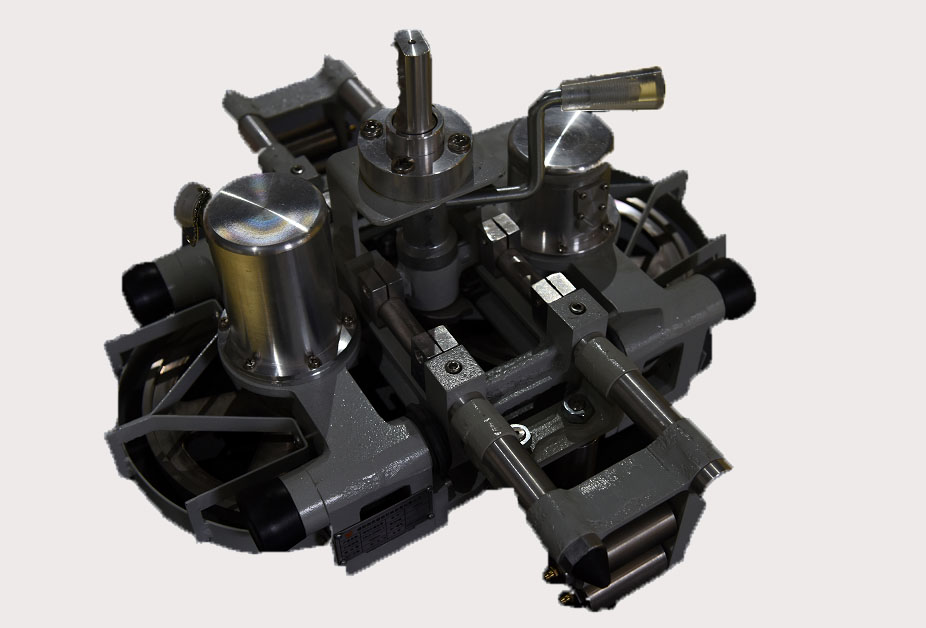
主要技術參數走纜方式直線(xiàn)走纜適應鋼絲φ3.2-φ4.0以(yǐ)上……

主要技術參數走纜方式繞主(zhǔ)、副計(jì)量輪一周適應鋼絲φ2.4……
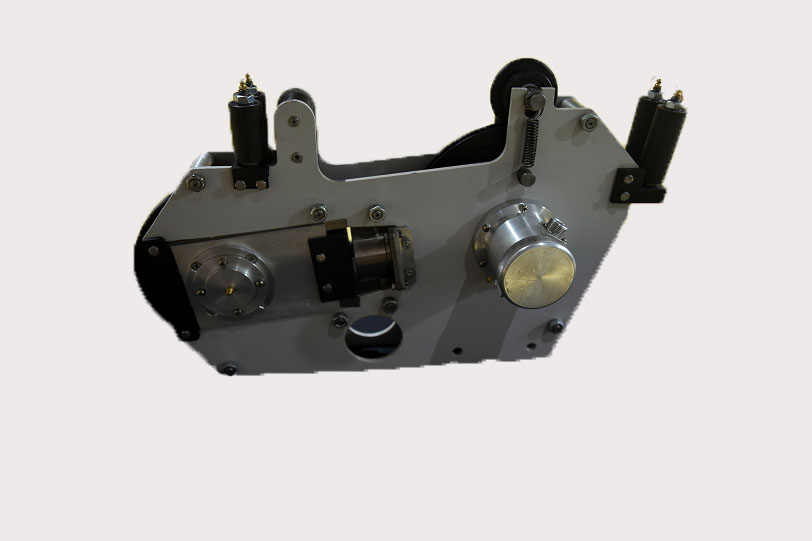
主要技術參數走(zǒu)纜方式繞計量輪(lún)一周(zhōu)適應鋼絲(sī)φ1.6-φ2.4……

主要技術(shù)參數走纜方式直線(xiàn)走纜適應電纜φ8-φ12.7計量輪(lún)……
XYQY-5-19型新(xīn)型(xíng)自控麵板使用說明(míng)
該麵板是我公司研發的新一代絞車智(zhì)能麵板,具(jù)有前幾代麵板的各項優點,有新增(zēng)添了自動控製,到井口自動停車報警,目的(de)層分段設置和遠程傳輸,雲端存儲,雙路輸入及黑匣子記錄功能。
(遠程傳輸和黑匣子功能需選配)
一、線路連接及接線定義:
(1)麵板(bǎn)使用DB37接口,接線定義如下:
| 信號(hào) |
說明 |
信號 |
說(shuō)明 |
||
| 1 |
GND |
係統(tǒng)供電GND |
20 |
繼電器 |
NC |
| 2 |
DC24VI/12VI |
係統電源 |
21 |
RXD232 |
串口接收 |
| 3 |
TXD232 |
串口發(fā)送 |
22 |
GND |
串(chuàn)口GND |
| 4 |
AGND |
信號GND |
23 |
AGND |
信號GND |
| 5 |
5VO |
編碼器5V電源 |
24 |
5VO |
編碼器5V電源 |
| 6 |
AI1+ |
編碼器1 A+ |
25 |
BI1+ |
編碼器1 B+ |
| 7 |
AI2+ |
編碼器2 A+ |
26 |
BI2+ |
編碼器2 B+ |
| 8 |
AGND |
編碼器 GND |
27 |
AGND |
編碼器(qì)GND |
| 9 |
12VO |
張力計12V電源 |
28 |
12VO |
張力計(jì)電源 |
| 10 |
ZLI1 |
張力計1信號 |
29 |
ZLI2 |
張力計2信號 |
| 11 |
AGND |
張力計 GND |
30 |
AGND |
張力(lì)計GND |
| 12 |
AO |
編(biān)碼器輸出 A |
31 |
BO |
編碼(mǎ)器輸出 B |
| 13 |
ZLO |
張力(lì)信(xìn)號輸出 |
32 |
||
| 14 |
AGND |
信號輸出 GND |
33 |
||
| 15 |
HCAI |
滾筒手柄輸入 A |
34 |
HCAO |
滾(gǔn)筒手柄輸出 A |
| 16 |
HCBI |
滾筒手柄輸入 B |
35 |
HCBO |
滾筒手柄輸出 B |
| 17 |
BREAKI |
滾筒刹車信(xìn)號輸入 |
36 |
BREAKO |
滾筒刹車(chē)信號輸出 |
| 18 |
COM |
繼電器COM |
37 |
NC |
繼電器NC |
| 19 |
NO |
繼電器NO |
(2)遠(yuǎn)程傳輸互聯網接口(kǒu)采用RJ-45標準接頭和接口。
二、主界麵及主界麵下設置

在主界(jiè)麵左邊由上至下依次為深度、速度、張力、張力增量視窗,
各個視(shì)窗(chuāng)右麵(miàn)對應(yīng)的是各視窗(chuāng)顯示數據的曲線和進度條。深度進(jìn)度條和曲線(xiàn)*大值默認(rèn)為6000米(mǐ),如需修改,可在係統設置中的5個目的層設置框中輸入,輸入格式比如要設置(zhì)2000到2030這個層(céng),則輸入2000/2030。係統會依據5個框中輸入的一個主大值為深度的曲線和進度條*大值。速度、張力、張(zhāng)力差分進(jìn)度(dù)條和(hé)曲線*大值為此三項再設置界麵下設置的極(jí)限值。下(xià)麵由左向右5個(gè)藍色方框為5個目的層的速度報警指示燈,報警時變紅(hóng)。下麵(miàn)是雲端連接標誌、說(shuō)明書(shū)、係統設置、報警解除、啟動控(kòng)速、和另(lìng)一通(tōng)道的深度、張力視窗及係統時間。
(1)深度預置及清零:(下圖)在主界麵(miàn)深度視窗長按1秒以上係統會彈出深度設置對話框,用戶可根據需要預置(zhì)深度及清零。

(2)張力(lì)清零:在(zài)張力視窗長按1秒以上張力即可清零。
(3)通道切換:(如下圖)在主界麵右下角點按通道顯示框(kuàng)來切(qiē)換通(tōng)道1、2在主界(jiè)麵的顯示。
注:黑匣子記(jì)錄、深度、張力輸出及遠程傳輸隻記(jì)錄和傳輸在主界麵顯示通道的數(shù)據。
(4)自動控速(sù):(如下圖(tú))在主界麵下按“啟(qǐ)動控(kòng)速”
丁代克(kè)")
注意:自動控製功能建議用戶(hù)根據井況使用,井況不明或複雜井況建議謹慎使用!
(5)警報解除:用來解除係統當前的報警。
(6)右下角顯示當前時間,如連接互聯網可自動對時。
(7)三(sān)、係統設(shè)置:
(1)參數設置:(下圖(tú))在主界(jiè)麵(miàn)下點按“係統設置”按鍵計入係統設置界麵。可分別在通(tōng)道一和通道(dào)二下方由上至下分別輸入脈衝數、張力(lì)係數(shù)、極限張力、和(hé)張力差分(fèn)。極限速度參數可一次設置,沒有分開。

(此處的值在出廠時,已(yǐ)根據所配馬丁代克的參數設置完畢。如發現參數異常可按(àn)恢複(fù)出廠設置進行恢複)
(2)單位轉換:(如下(xià)圖)分別在“張力單位”、“深度單位”和“速度單(dān)位”的右麵的當前顯示單位上點按來選定需要(yào)使用的單位。張力單位(wèi)可在kg、kn、lb間實時換算並轉換。深度單位可在m和foot間實時換算(suàn)並(bìng)轉換,速度單位(wèi)可在h和min之間實時換(huàn)算並轉換。
設備有限(xiàn)公(gōng)司")
(3)電子(zǐ)深度換向:(如下圖)再設置界麵左下角設有“通道(dào)1”和“通道(dào)2”換(huàn)向鍵每點一次對應的編碼器顯示方向轉換。可根據需要進行調節。
(4)中英文轉換:在(zài)“中文”和“English”鍵上點按來切(qiē)換需要顯(xiǎn)示的(de)係統語言。
(5)深度報警點(diǎn)設置:(如下圖)在(zài)係統設置界麵點(diǎn)“下一頁”,在深度報警(jǐng)點設置欄下的5個添加框裏輸入需要的報警點。
設備(bèi)有限公司(sī)")
注:此處(chù)的報警點隻是在上提時報警。
(6)目的層設置和目的層速(sù)度設置:(如圖)
油石油設備有限公司")
這裏“目的層(céng)深度設置”和“目的層速度設置”兩項設置下從左至右5個輸入框上下互相關(guān)聯(lián),“目的層速度設置”和主界麵左下角這5個指(zhǐ)示燈
![]() 第1個(gè)會變紅同時報警。目(mù)的層(céng)設置格式在主界麵深度進度(dù)條曲線(xiàn)*大值設置裏可見。
第1個(gè)會變紅同時報警。目(mù)的層(céng)設置格式在主界麵深度進度(dù)條曲線(xiàn)*大值設置裏可見。
(7)時間設置:(如下(xià)圖)在時間設置右邊顯示的當前時間上點擊,輸入要修改的時間。格式為年—月—日空格時:分:秒。如:2019年1月11日(rì)16時11分27秒(miǎo)則輸入2019-01-11 16:11:27。
油")
克(kè)")
在井號、車號下方輸(shū)入框輸入需要的井號和車號。
注:以上所有係統設置及(jí)參數設置完成後,均按右下角“退(tuì)出”鍵確定。
(9)導出數據:(選配)帶有數據記錄(lù)功能的麵板。插上U盤後(hòu),再設置界麵點“下一頁”按鍵,然後(hòu)點“導出數據”係統會彈出對話框,可根據導出選項(xiàng)導出所需時間內的數據。(如下圖)
儀秦油")


(11)序列號、用戶名、軟硬件版本查看:再設置界麵按“設備版本”查看。(下圖)

說明完畢,感謝閱(yuè)讀。
Related information
Contact
聯係人(rén):虎崇學
電 話:13909107387
座 機:029-88686309
郵 箱:XYQINYOU@163.COM
地(dì) 址:鹹陽秦都區西部雲(yún)穀1期12號樓103










 頁麵位置 :
頁麵位置 :
 聯係人:虎崇學
聯係人:虎崇學 聯係電話:13909107387
聯係電話:13909107387 聯係地址(zhǐ):鹹陽秦都區西部雲穀1期12號樓103
聯係地址(zhǐ):鹹陽秦都區西部雲穀1期12號樓103